描述
技術規格
1.減速馬達規格: 5V,減速比1:48
2.車子 長x寬(包括輪子): 20cm x 18.5cm。
- 藍牙模組 2.0
商品內容
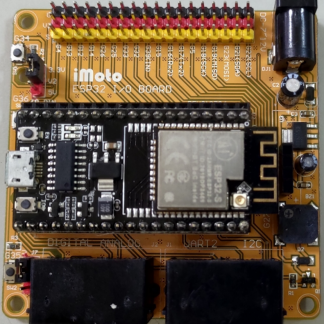
- Motoduino U1 電路板一片(相容於Arduino UNO)
- 藍芽模組一片
- USB傳輸線
- 十字及一字螺絲起子各一支
- 車體(兩個輪胎及減速馬達,一個萬向輪等)
- 2顆18650電池盒
程式範例
手機藍牙遙控車Arduino程式
//////////////////////////////////////////
// 程式說明: Android藍芽手機遙控車配合Motoduino U1使用
// 作者: Dennis Chen 2015
// Email:
/////////////////////////////////////////
// 馬達與motoduino的腳位對應
const int Motor_E1 = 5; // 控制馬達1轉速 digital pin 5 of Arduino (PWM)
const int Motor_E2 = 6; // 控制馬達2轉速 digital pin 6 of Arduino (PWM)
const int Motor_M1 = 10; // 控制馬達1正反轉 digital pin 10 of Arduino
const int Motor_M2 = 11; // 控制馬達2正反轉 digital pin 11 of Arduino
char val; // 接收來自藍芽資料
void setup()
{
// Start serial communication at 57600 baud rate(傳輸率)
Serial.begin(57600);
pinMode(Motor_M1, OUTPUT); //設定 Motor_M1為輸出腳位
pinMode(Motor_M2, OUTPUT); //設定 Motor_M2為輸出腳位出
}
//////////// 主程式 ////////
void loop()
{ if(Serial.available())
{ val = Serial.read();
switch(val) {
case ‘f’: // 前進
forward(0, 255);
break;
case ‘b’: // 後退
backward(0, 255);
break;
case ‘l’: // 左轉
left(0, 255);
break;
case ‘r’: // 右轉
right(0, 255);
break;
case ‘s’: // 停止
motorstop(0, 0);
break;
} }
}
void motorstop(byte flag, byte motorspeed)
{
Serial.println(“stop!”);
digitalWrite( Motor_E1, motorspeed);
digitalWrite( Motor_E2, motorspeed);
}
void forward(byte flag, byte motorspeed)
{
Serial.println(“forward!”);
digitalWrite( Motor_M1, HIGH);
digitalWrite( Motor_M2, HIGH);
analogWrite( Motor_E1, motorspeed);
analogWrite( Motor_E2, motorspeed);
}
void backward(byte flag, byte motorspeed)
{
Serial.println(“backward!”);
digitalWrite( Motor_M1, LOW);
digitalWrite( Motor_M2, LOW);
analogWrite( Motor_E1, motorspeed);
analogWrite( Motor_E2, motorspeed);
}
void right(byte flag, byte motorspeed)
{
Serial.println(“right!”);
digitalWrite( Motor_M1, HIGH);
digitalWrite( Motor_M2, HIGH);
analogWrite( Motor_E1, 0);
analogWrite( Motor_E2, motorspeed);
}
void left(byte flag, byte motorspeed)
{
Serial.println(“left!”);
digitalWrite( Motor_M1, HIGH);
digitalWrite( Motor_M2, HIGH);
analogWrite( Motor_E1, motorspeed);
analogWrite( Motor_E2, 0);
}
接線範例
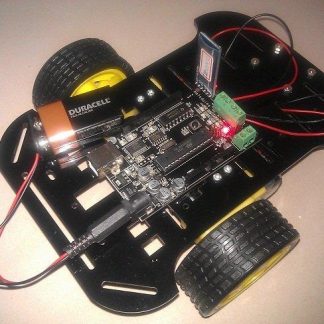
組裝完成圖。